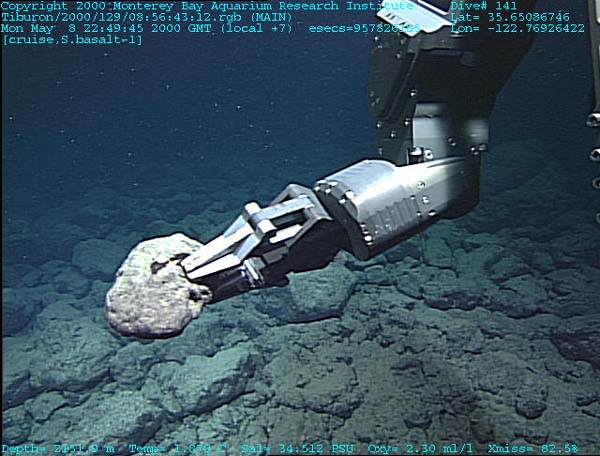
ROVs can have many tools attached to help them sense and interact with the world. Most have at least a video camera and lights, but many have even more to be able to gather a lot of data. This various equipment can include sonar, magnetometers which measure magnetic fields, arms to grab and move things, and many tools to measure traits of the water around the vehicle.
 Nowadays, ROV is used for many applications. Some of the most common hydrographic application included object identification, and vessel hull inspections.
Nowadays, ROV is used for many applications. Some of the most common hydrographic application included object identification, and vessel hull inspections.What major parts are there to an ROV?
However, always remember that it is better not to over design the ROV other than the major parts.
How do ROVs “sense” the world?
Accordingly, all components of an ROV system should be considered to the maximum operating depth of the underwater environment with safety factors. The floats and weights, creating the center of buoyancy and gravity, give the ROV ability to operate under water. And the camera and thruster bring the images and movements.

How do they move?
ROVs basically are able to move horizontally. Depending on how you connect the motors and the battery, you should be able to make ROV spin or move in a straight line. However, ROV can also be made to move in every direction using only horizontally-mounted thrusters.ROVs can have many tools attached to help them sense and interact with the world. Most have at least a video camera and lights, but many have even more to be able to gather a lot of data. This various equipment can include sonar, magnetometers which measure magnetic fields, arms to grab and move things, and many tools to measure traits of the water around the vehicle.
How do we communicate with the ROV while it is underwater?
The ROV is controlled by a tether that is connected to it which runs back to the surface. The cord is neutrally buoyant so it doesn’t impair the vehicle’s movement while it is maneuvering underwater. |
| Cutlet, from the 1950s |
 |
| Hercules, built in 2003 |